
This article is part 3 in the series about transformation matrices:
- Part 1: Coordinate systems and transformations between them
- Part 2: Scaling objects with a transformation matrix
- Part 3: Shearing objects with a transformation matrix (this article)
- Part 4: Translating objects with a transformation matrix
- Part 5: Combining Matrix Transformations
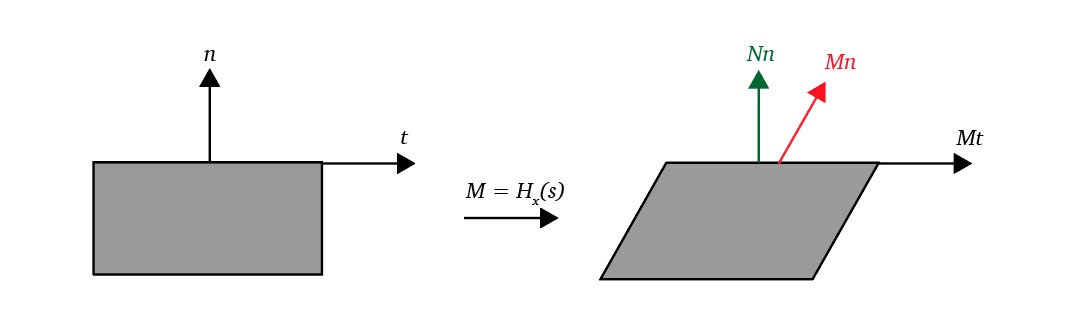
2D Shearing
In 2D, we can skew points towards the $x$-axis by making $x’ = x + sy$. If $s > 0$, then points will skew towards the positive $x$-axis; if $s < 0$, points will move towards the negative $x$-axis.
The transformation matrix that skews points towards the $x$-axis is:
$$
\begin{equation} \label{2d-shear-x}
\mathbf{H_x}(s) = \begin{bmatrix}
1 & s \\
0 & 1
\end{bmatrix}
\end{equation}
$$
Towards the $y$-axis is:
$$
\begin{equation} \label{2d-shear-y}
\mathbf{H_y}(s) = \begin{bmatrix}
1 & 0 \\
s & 1
\end{bmatrix}
\end{equation}
$$
For example, a vector $\mathbf{v}$ multiplied by \eqref{2d-shear-x} results in:
$$
\mathbf{v'} = \mathbf{H_x}(s)\mathbf{v} = \begin{bmatrix}
1 & s \\
0 & 1
\end{bmatrix} \begin{bmatrix} v_x \\ v_y \end{bmatrix} = \begin{bmatrix} v_x + sv_y \\ v_y \end{bmatrix}
$$
3D Shearing
The notation $\mathbf{H_{xy}}$ indicates that the $x$ and $y$ coordinates are shifted by the other coordinate, $z$, i.e.:
$$
\begin{align*}
x' &= x + sz \\
y' &= y + tz \\
z' &= z
\end{align*}
$$
The shearing matrices in 3D are:
$$
\begin{equation} \label{shear-xy}
\mathbf{H_{xy}}(s,t) = \begin{bmatrix}
1 & 0 & s \\
0 & 1 & t \\
0 & 0 & 1
\end{bmatrix}
\end{equation}
$$
$$
\begin{equation} \label{shear-xz}
\mathbf{H_{xz}}(s,t) = \begin{bmatrix}
1 & s & 0 \\
0 & 1 & 0 \\
0 & t & 1
\end{bmatrix}
\end{equation}
$$
$$
\begin{equation} \label{shear-yz}
\mathbf{H_{yz}}(s,t) = \begin{bmatrix}
1 & 0 & 0 \\
s & 1 & 0 \\
t & 0 & 1
\end{bmatrix}
\end{equation}
$$
For example, a vector $\mathbf{v}$ multiplied by \eqref{shear-xy} results in:
$$
\mathbf{v'} = \mathbf{H_{xy}}(s,t) \mathbf{v} = \begin{bmatrix}
1 & 0 & s \\
0 & 1 & t \\
0 & 0 & 1
\end{bmatrix} \begin{bmatrix} v_x \\ v_y \\ v_z \end{bmatrix} = \begin{bmatrix} v_x + sv_z \\ v_y + tv_z \\ v_z \end{bmatrix}
$$