
A normal vector to a curve at a particular point is a vector perpendicular to the tangent vector of the curve at that point (also called a gradient). For an implicit 2D function in the form $f(x,y) = 0$, the 2D gradient is:
For an implicit 3D function, the normal is the vector perpendicular to the surface. The surface normal at a point $\mathbf{p}$ is given by the gradient of the implicit function:
For a plane, we know that the dot product of the normal $\mathbf{n}$ and any vector that lies in the plane is zero. Therefore, we can model a plane as the following implicit equation:
Where $\mathbf{p}$ and $\mathbf{a}$ are any two points lying on the plane. Sometimes we want the equation of a plane through points $\mathbf{a, b, c}$. The normal can be found by taking the cross product of any two vectors on the plane:
Transforming Normal Vectors
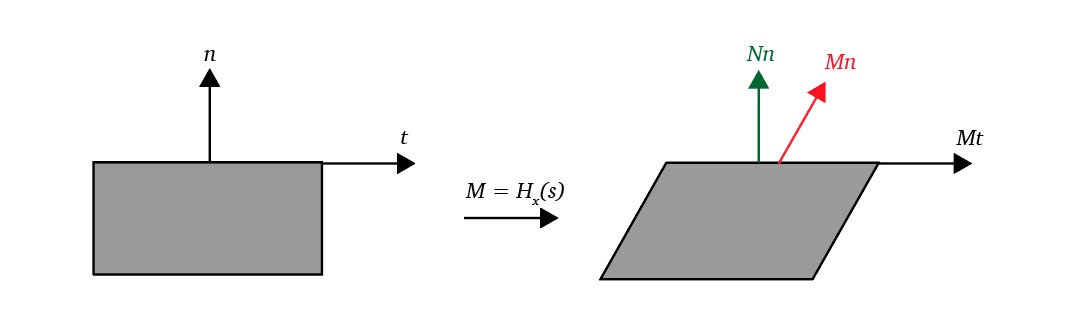
Normal vectors do not transform the way we would like when they’re multiplied by a transformation matrix. If the points on a surface are transformed by the transformation matrix $\mathbf{M}$, a vector $\mathbf{t}$ tangent to the surface will still be tangent to the transformed surface. However, a surface normal vector $\mathbf{n}$ may not be normal to the transformed surface.
For example, when a transformation matrix $\mathbf{M} = \mathbf{H_x}(s)$ that skews points toward the $x$-axis multiplies the normal vector $\mathbf{n}$, the resulting vector $\mathbf{Mn}$ is not normal to the surface. We would like to find a transformation matrix $\mathbf{N}$ so that $\mathbf{Nn}$ is indeed the surface normal.
Transforming Normal
To find the value of $\mathbf{N}$, we start from the fact that the normal $\mathbf{n}$ and the tangent $\mathbf{t}$ are perpendicular:
Expressed as a matrix multiplication:
After the transformation, they’re still perpendicular, so:
Applying the transpose:
Relating \eqref{post-transformation} with \eqref{perpendicular}, we see that the only way that both equations hold true is that:
The value of $\mathbf{N}$ is then: