In Euclidean geometry, two lines are said to be parallel if they lie in the same plane and never meet. Moreover, properties like this one don’t change when a Euclidean transformation is applied (translation/rotation). However, what we perceive in real life is different from what’s described by Euclidean geometry.
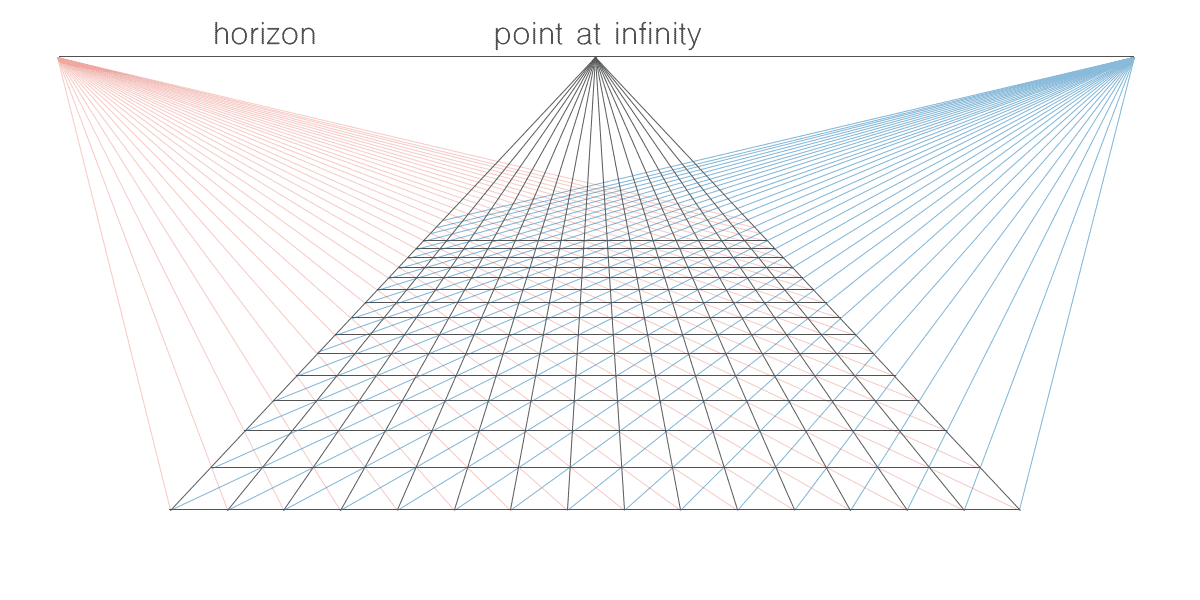
This problem coincided with the one Renaissance artists had while trying to paint on a canvas. When they tried to paint tiles on a canvas, they realized that the following rules applied:
- parallel lines meet on the horizon
- straight lines must be represented on the page by straight lines
- the image of a conic is also a conic (for example a circle is drawn as an ellipse depending on the perspective)
projection
The French mathematician Girard Desargues , researching more on this new type of geometry, had the necessity to have a point at infinity. He introduced the concept of a line at infinity, which helped define the point at infinity as follows:
For every family of parallel lines on some ordinary plane, there’s one point at infinity where they all meet, which lies on the line at infinity
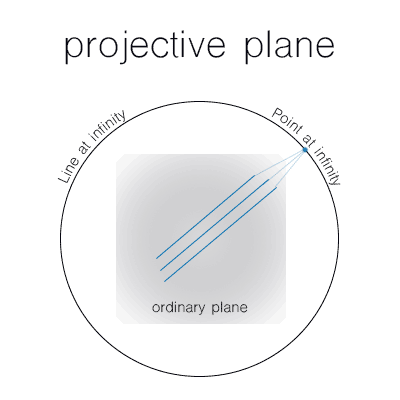
projective plane
An ordinary plane plus the line at infinity is called a projective plane
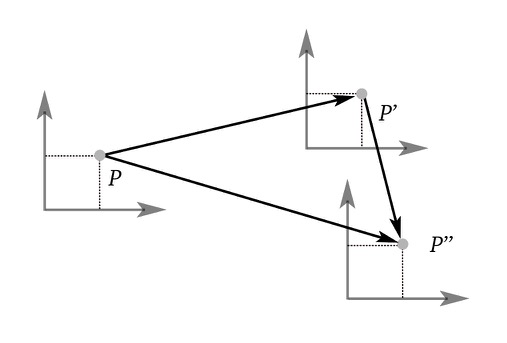
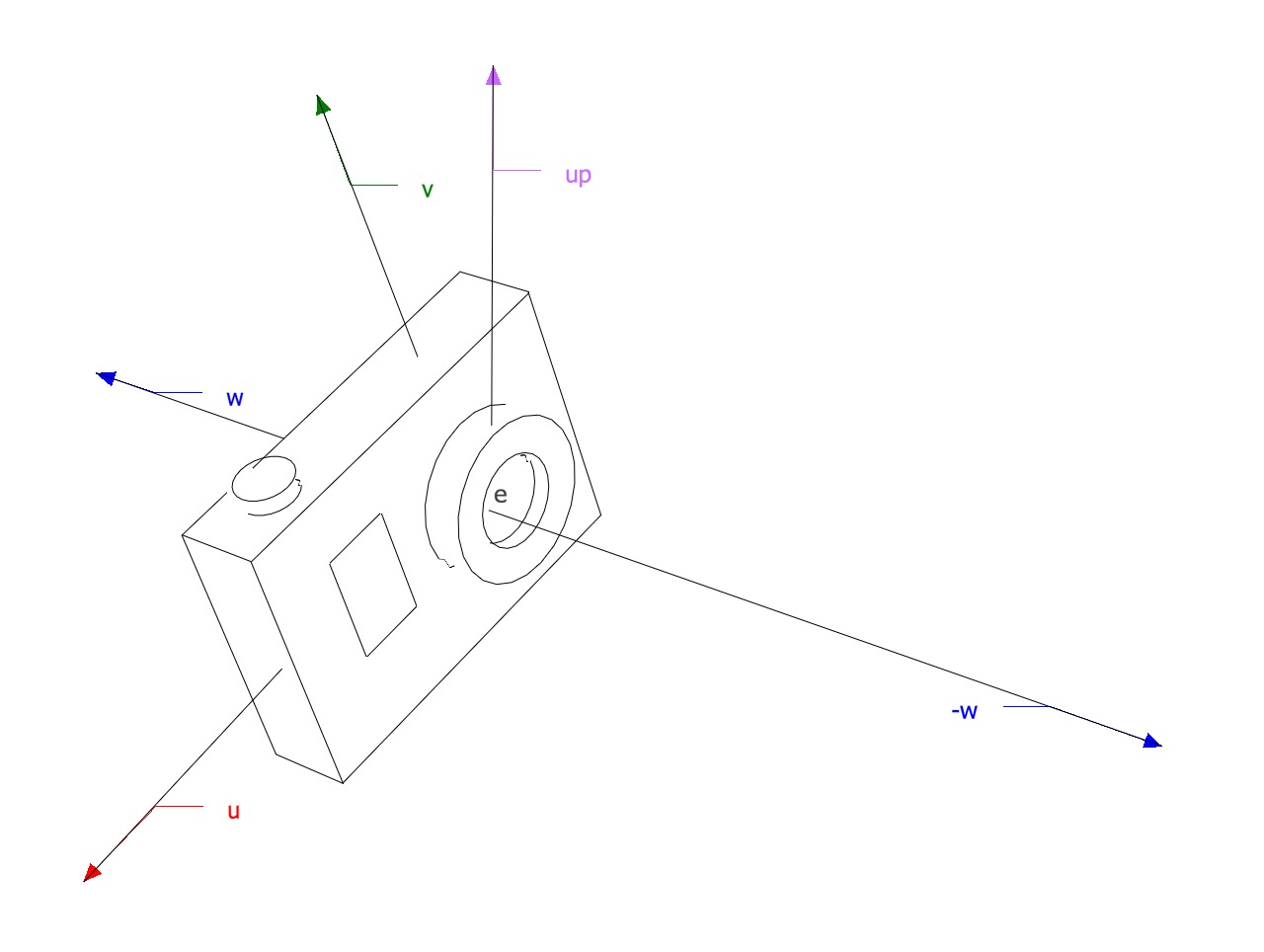
Projective geometry exists in any number of dimensions (just like Euclidean geometry). When we take a picture using a camera, the imaging process makes a projection from $P^3$ to $P^2$; such a process is called a projective transformation.
Properties of projective transformations:
- Preservation of type (points remain points, and lines remain lines).
- Incidence (a point remains on a line after transformation).
In 1D, there’s the projective line, which is an ordinary line plus one point at infinity that can be reached by moving towards each end of the line.
Projective line
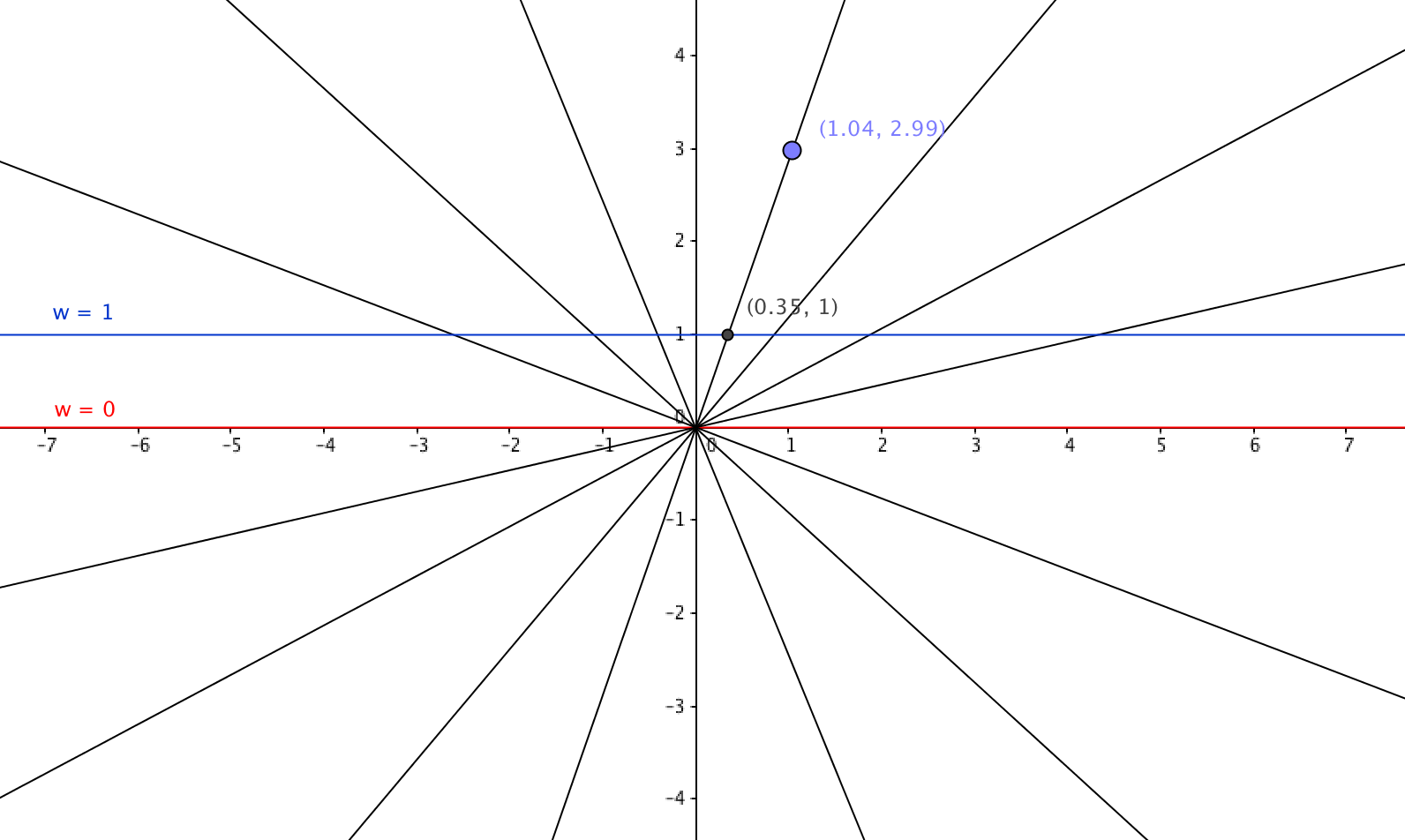
Spaces of 1-dimensional subspaces that exist in 2-dimensions, i.e., any line that passes through the origin in a 2-dimensional space.
Let $w$ be the vertical axis in this 2-dimensional space. The picture of a line at infinity is shown by looking at the line $w = 1$ and its relation to $w = 0$. Almost all the lines that pass through the origin intercept $w = 1$, except the line $w = 0$. Therefore, we can see that the set of points that exists on the line $w = 1$ is the same as the set that contains all the interception points between all the possible 1-dimensional subspaces and $w = 1$. However, the line $w = 0$ (which is also part of the 1-dimensional subspaces) doesn’t meet $w = 1$, so $w = 0$ plays the role of infinity with respect to $w = 1$.
Any 1D point is represented in projective geometry as the pair $(x, w)$. We can see that such a pair can be projected to $w = 1$ by dividing both coordinates by $w$. Thus, any 1D point projected to this plane is represented by the pair $( frac{x}{w}, 1)$, unless $w = 0$, which is in the line at infinity. Any point at infinity then has the form $(x, 0)$.
projective line
Projective plane
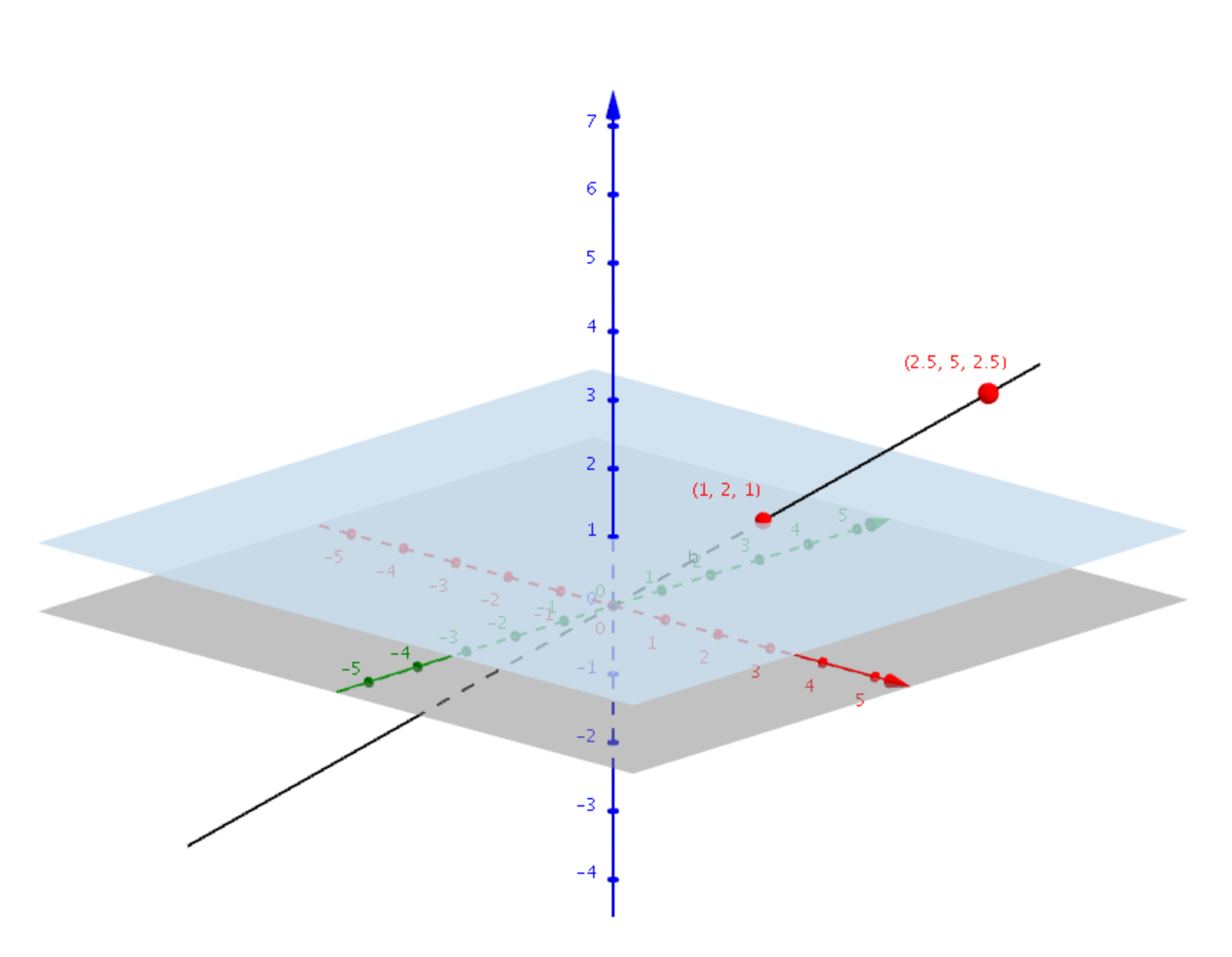
Spaces of 1-dimensional subspaces that exist in 3-dimensions, i.e., any line that passes through the origin in a 3-dimensional space.
A similar situation is seen in a 3-dimensional space. In this space, any line that passes through the origin intercepts the plane $w = 1$, except for the set of lines that lie in the plane $w = 0$. Thus, $w = 0$ plays the role of infinity with respect to $w = 1$.
Any 2D point is represented in this space as the triplet $(x, y, w)$. Just like in 1D, we can project any point to the plane $w = 1$ by dividing the triplet by $w$, which has the form $( frac{x}{w}, frac{y}{w}, 1)$, unless $w = 0$. This means that any point at infinity has the form $(x, y, 0)$.
projective plane