
iterations, batch, batch size and epoch
- A batch is the set of examples used in one iteration. The number of examples in the set is the batch size.
- For example, the batch size of SGD is 1, while the batch size of a mini-batch is usually between 10 and 1,000. The batch size is usually fixed during training and inference; however, TensorFlow does permit dynamic batch sizes.
- Each iteration is the span in which the system processes one batch of size batch size.
- An epoch spans sufficient iterations to process every example in the dataset, i.e., an epoch represents $\frac{N}{batchSize}$ training iterations, where $N$ is the number of samples.

Batch, batch size, epoch
k-fold cross validation
From https://www.analyticsvidhya.com/blog/2018/05/improve-model-performance-cross-validation-in-python-r/
- Randomly split your entire dataset into k “folds”.
- For each k-fold in your dataset, build your model on k-1 folds of the dataset. Then, test the model to check the effectiveness for the kth fold.
- Record the error you see on each of the predictions.
- Repeat this until each of the k-folds has served as the test set.
- The average of your k recorded errors is called the cross-validation error and will serve as your performance metric for the model.
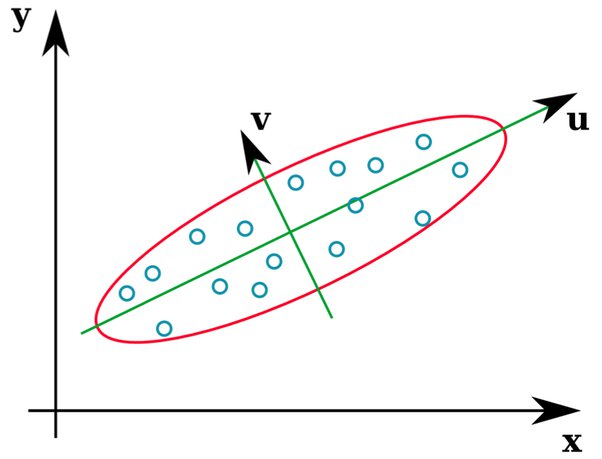
feature extraction
Merge several correlated features into one. Also, see dimensionality reduction.
sampling noise/bias
Sampling noise: Non-representative sample data as a result of chance (typically when the sample is too small). Sampling bias: Non-representative sample data as a result of a flaw in the sampling method.