
Given a square matrix $\mathbf{M}$:
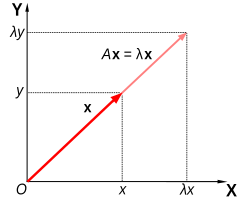
- An eigenvector $\mathbf{v}$ is a non-zero vector whose direction doesn’t change when multiplied by $\mathbf{M}$. Note that if $\mathbf{M}$ has an eigenvector, then there are an infinite number of eigenvectors (vectors parallel to $\mathbf{v}$).
- An eigenvalue $\lambda$ is the scale factor associated with an eigenvector $\mathbf{v}$ of $\mathbf{M}$ after multiplication by $\mathbf{M}$.
Assuming that $\mathbf{M}$ has at least one eigenvector $\mathbf{v}$, we can perform standard matrix multiplications to find it. First, let’s manipulate the right side of \eqref{eigenvector} so that it also features a matrix multiplication.
Where $\mathbf{I}$ is the identity matrix, next we can rewrite the last equation as
Because matrix multiplication is distributive
The quantity $\mathbf{M} - \lambda \mathbf{I}$ must not be invertible. If it had an inverse, we could premultiply both sides by $(\mathbf{M} - \lambda \mathbf{I})^{-1}$, which would yield
The vector $\mathbf{v = 0}$ fulfills \eqref{eigenvector}. However, we’ll try to find a vector $\mathbf{v} \not = \mathbf{0}$. If such a condition is added, then the matrix $\mathbf{M} - \lambda \mathbf{I}$ must not have an inverse, which also means that its determinant is 0.
If $\mathbf{M}$ is a $2 \times 2$ matrix, then
From \eqref{lambda}, we can find two values for $\lambda$, which may be unique or imaginary. A similar manipulation for an $n \times n$ matrix will yield an $n$th degree polynomial. For $n \leq 4$, we can compute the solutions by analytical methods; for $n > 4$, only numeric methods are used.
The associated eigenvector can be found by solving \eqref{eigenvector-0}
Applications
List of applications
- If $\mathbf{M}$ is a transformation matrix, then $\mathbf{v}$ is a vector that isn’t affected by the rotation part of $\mathbf{M}$. Therefore, $\mathbf{v}$ is the rotation axis of $\mathbf{M}$.