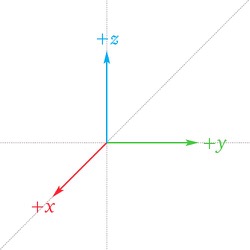
Geometry
There's a total of 9 notes.
Culling & Clipping
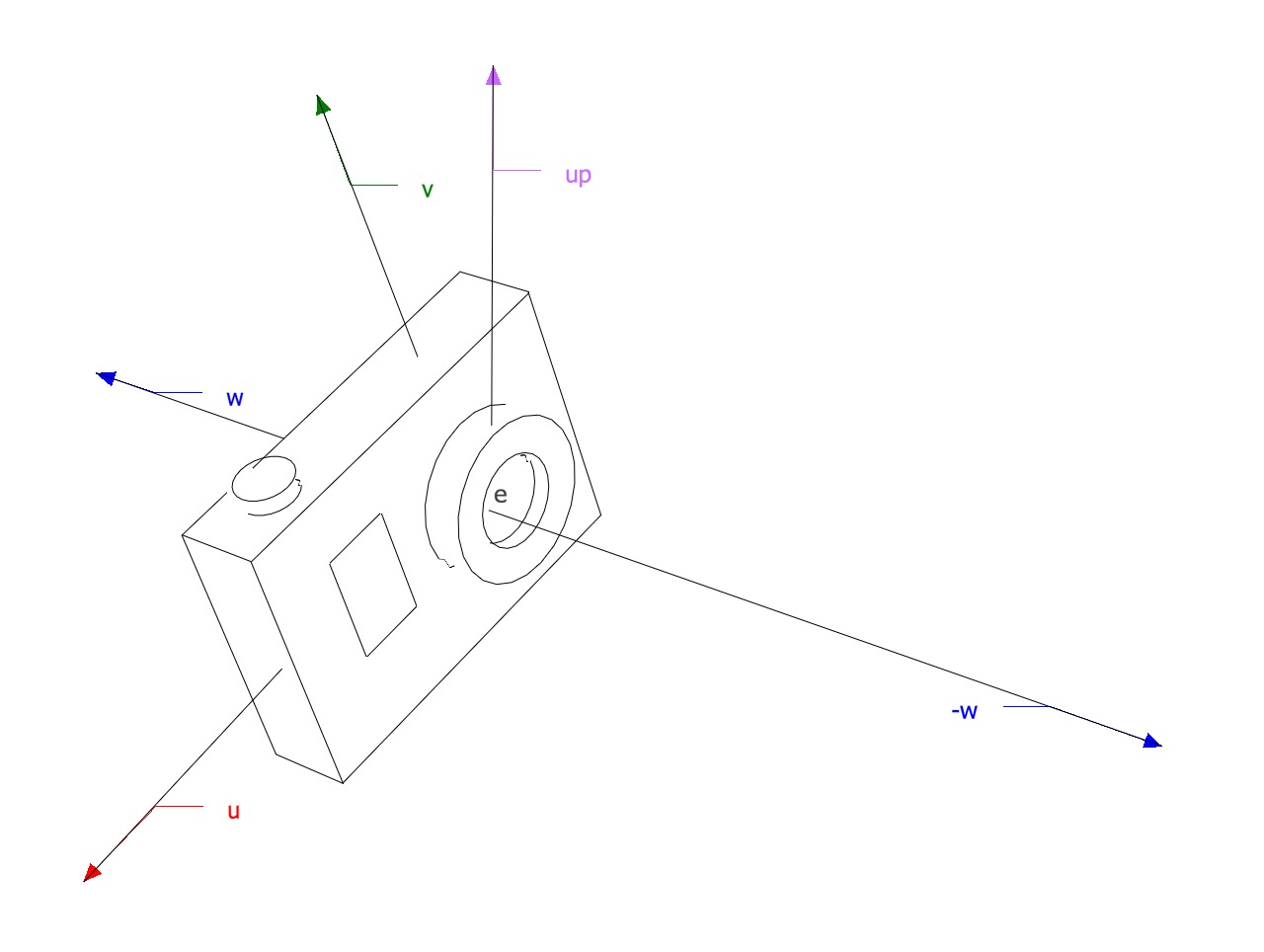
The math behind culling and clipping and how it’s related with the camera and with what it sees.
- Culling is a process where geometry that’s not visible from the camera is discarded to save processing time.
- Clipping is a process that removes parts of primitives that are outside the view volume (clipping against the six faces of the view volume).

Affine spaces
An affine space is a generalization of the notion of a vector space, but without the requirement of a fixed origin or a notion of “zero”.
Vector spaces
A vector space is a set whose elements are called “vectors” (denoted as $\v{v}$ or $\mathbf{v}$) which have two operations defined on them: addition of vectors and multiplication of an scalar by a vector.
This article covers some examples of vector spaces, basis of vectores spaces and linear maps.
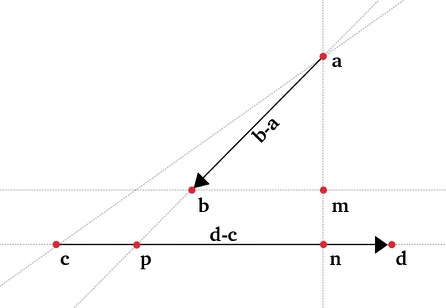
Triangle in affine spaces
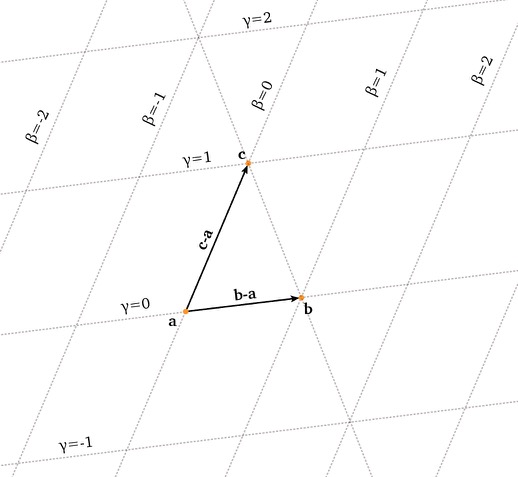
In an affine space any point can be represented by a sum of an origin point plus a set
of scaled vector. This article covers defining all the points in a triangle in an affine space.
Geometric tests
Different algorithms to test geometric properties like finding the intersection of two lines.
Normals
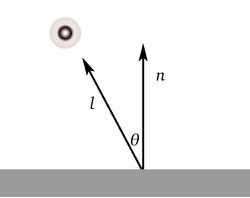
A normal vector to a curve at a particular point is a vector perpendicular to the tangent vector of the curve at that point (also called a gradient).
Projective space
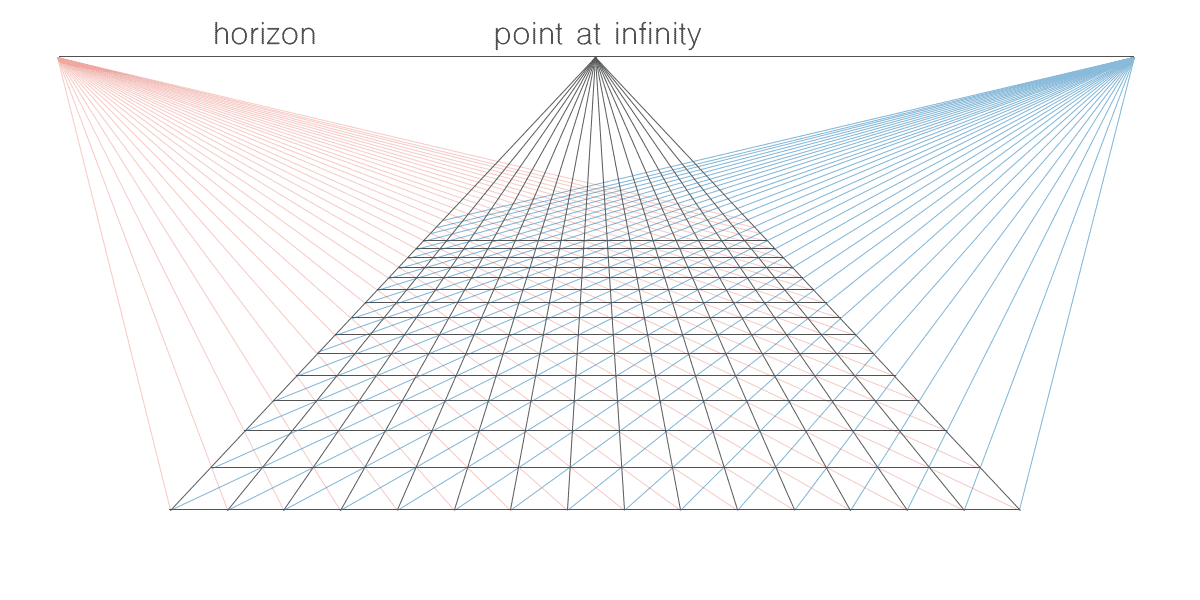
In projective geometry unlike euclidean geometry, two parallel lines meet at a point. Desargues
introduced the concept of a line at finity where a point at infinity can be defined. This article
covers the need of a point at infinity in projective space, the line at infinity and the projective plane.
Euler angles

Euler angles are a way to describe the orientation of a rigid body with 3 values, these values represent 3 angles:
- yaw - Rotation around the vertical axis
- pitch - Rotation around the side-to-side axis
- roll - Rotation around the front-to-back axis
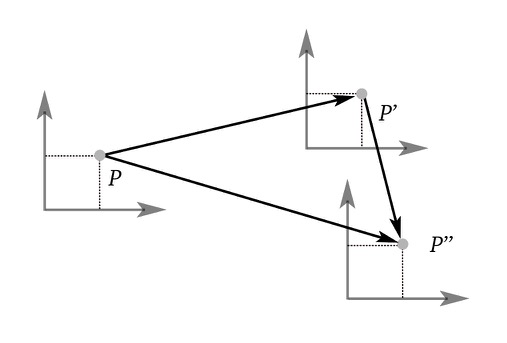
Transformation matrix
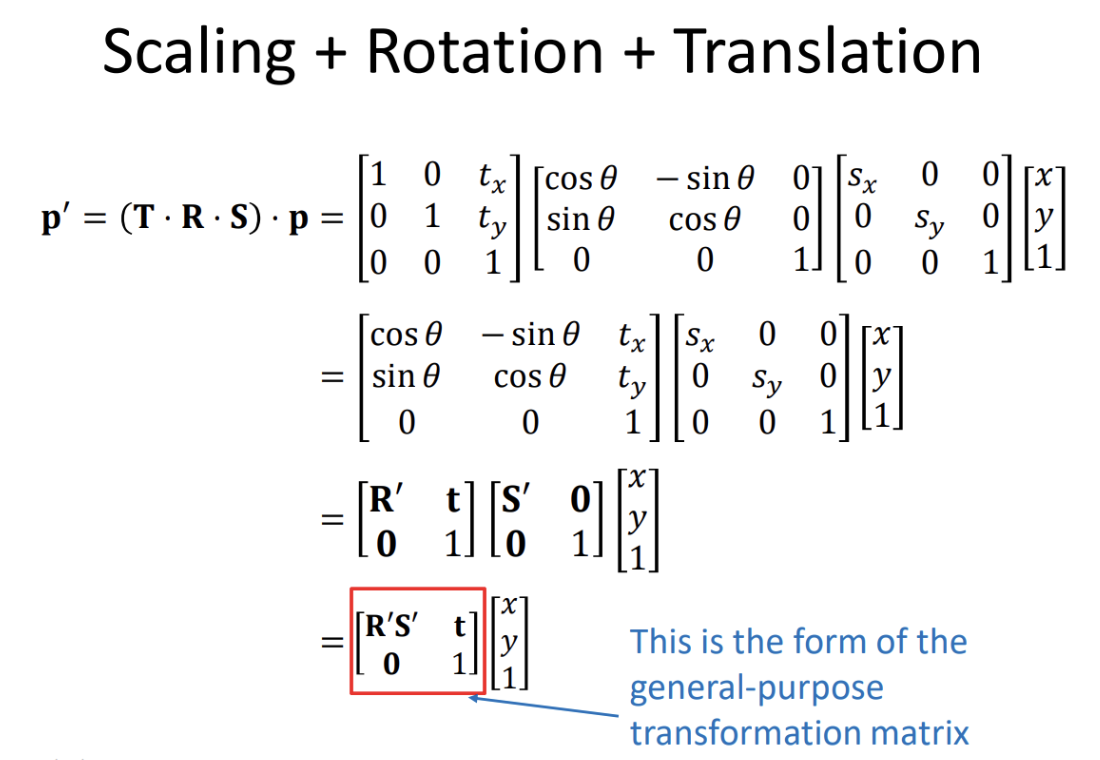
A linear transformation can be represented with a matrix which transforms vectors from
one space to another. Transformation matrices allow arbitrary transformations
to be displayed in the same format. Also matrices can be multiplied to enable
composition
. This article covers how to think
and reason about these matrices and the way we can represent them (row vectors vs column vectors).